机上の論理は80%。残りは人の感性で作り上げる
「駆動力配分の最終的なセッティングは加藤博義(日産のテストドライバー)が行いました。机上で性能を予測できるのは80%程度で、特にコーナリングの限界領域では4つのタイヤに働く力が複雑に変化するので難しいのです。そこで、加藤の試走に同乗し、走行中のコメントを詳しく聞いてから、その走行データを分析し、加藤の言う意味とデータの関係を理解した上で、一つ一つ制御ロジックに落とし込んでいきました」
路面μ(摩擦)の違い/速度差/ステアリングを切ったときの車輪の左右差を複合的にミックス。しかも4輪それぞれで測定するという地道な作業を繰り返し、完成までに約3年の月日が必要であった。
「とにかく、加藤博義なくして、R32(スカイラインGT-R)が完成することはありませんでした。 彼が道を切り開いたからこそ、走りの性能世界一が実現できたと思います」。 
未知の機構を商品化するためにあらゆる路面における操作、挙動のデータ取りが必要だった。加藤博義(写真)の努力なくして完成はなかった。加藤は2003年に厚生労働省管轄の「現代の名工」を受賞、翌2004年には「黄綬褒章」を受賞。

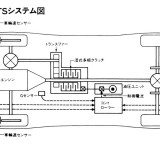
路面μの違いを判断するための横Gセンサー、制動性能の高度化を図るための前後Gセンサーは、センターコンソールボックスの下に内蔵される
さらにBNR32は横Gセンサーに加えて前後Gセンサーも採用している。前後Gセンサーの主な目的はABSの完璧な制動性能を確保するためにスリップ検知力を高めている。仮に4輪が空転し、実際の車速と4輪の回転速度がズレた場合、実際の車速と加速度の相関関係データを入力し、正しい制御を行うようにしている。つまり、4WDとABS用コンピュータは相互通信を行い、統合制御をすることで、運動性能を引き上げている。
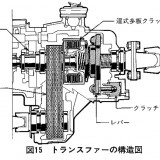
「ただ、クルマの運動性能最優先で作った結果、R32では結果として燃費を犠牲にしています。多板クラッチを押すための圧力をためるアキュームレーターはその数値が設定値以下に落ちると常時蓄圧するのですが、その際に電気をかなりロスします。また、R32/R33は4WDの切り替え時の応答性を高めるため、駆動配分を完全に0:100にはしていません。弱くつなぐことで、アクセルを強く踏んだときのリヤの空転を抑えますが、駆動ロスは当然発生してしまいます。ちなみにR34では、予測制御を加えることで、完全に0:100となっています」


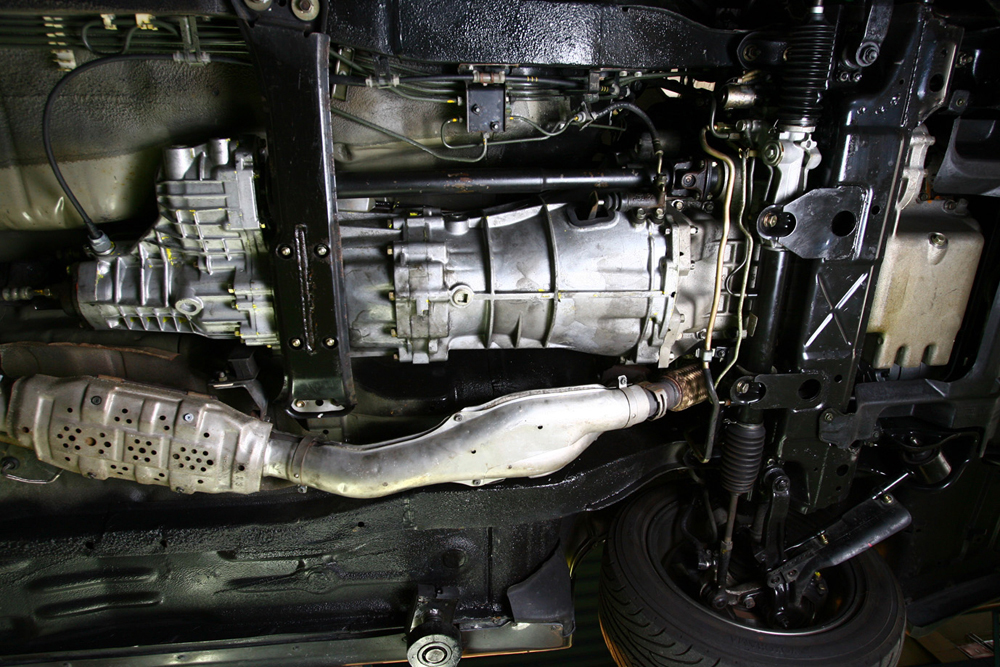
BNR32型スカイラインGT-Rの油圧ユニットはリヤデフの上にマウント。コンピュータからの信号で、ためた圧力をトランスファーのアクチュエータに送る。E-TSのコントロールユニットはトランク内上部の助手席側にある。2つのマイコンが内蔵され、4WDとABSを統合制御を行っている。