
自動運転には技術と法整備が必要だ
いまや「自動運転」は未来のテクノロジーではない。限られた条件下でのハンズオフ(手放し)運転は可能となっているし、無人走行のクルマも登場している。SFムービーのような完全自動運転の実現には技術、法整備の両面で課題があるのは事実だが、それもけっして夢物語というわけではない。そんなリアルな自動運転テクノロジーを理解するためのヒントとなるキーワードを6個選んでみた。どれも、ご存知の用語だろうが、あらためて整理の役に立てば幸いだ。
自動ではなく自律運転「Autonomous」
日本語では「自動運転」と呼んでいるが、自動=オートマチックというわけではない。「自動運転」そのものを英語表記すると「セルフ・ドライビング」となるが、自動車業界では「Autonomous」という言葉が多く使われている。この言葉は自律的に動くというニュアンスを持っている。遠隔操作で動いたり、プログラムされたルートをなぞったりするだけでは現代が求める自動運転には物足りない。
目的地や経由地を入力することで、クルマが自律的にルートを決め、周囲の安全を確認しながら動くことが自動運転には求められている。そうしたスタンスの象徴といえるのが「Autonomous」という言葉だ。当然、こうした自律走行を実現するには瞬間の判断をクルマが行なう必要がある。そのために高性能なAI(人工知能)が自動運転のキーテクノロジーとなっている。
レベル3まではドライバーの監視が必要
自動運転のレベル分けについては、いくつかの組織や団体が提案しているが、現時点ではアメリカに本拠を置く自動車技術の非営利団体「SAE インターナショナル」が定めた自動運転レベルがスタンダードとなっている。そのレベル分けは6段階で、まったく自動運転技術が用いられていない状態が「レベル0(ゼロ)」となる。国土交通省でもSAEのレベル分けに準拠した分類を用いている。
レベル1は運転支援といえるもので、衝突被害軽減ブレーキやACC(追従クルーズコントール)、車線維持アシスト機能などが「単独」で装着されている状態を指す。
レベル2は、レベル1の機能を組み合わせた状態で、たとえばACCと車線維持アシスト機能を組み合わせることで実現する。この例でいえば加減速とステアリング操作という異なる要素において運転支援機能が働いているので、自動運転レベル2というわけだ。また、自動追い越しや高速道路における合流などを自動でこなす機能もレベル2に含まれる。操作としては人間の介在は最小限となるが、「ドライバーによる監視」が絶対に必要な状態ではレベル2にとどまるのだ。
逆に、レベル3から上は「システムによる監視」が基本となり、自動運転中において人間はシステムや周囲の状況を監視する必要性から解放される。ただし、レベル3というのは「条件付自動運転」とも呼ばれるもので、高速道路など特定の条件下において機械に運転を任せられるというものであって、運転を人間に切り替えることを前提としている。つまり自動運転中にもドライバーは居眠りできないし、なにかあれば即座に運転を行なう必要がある。ただし、そうした切り替えを前提としたシステムはかえって危険という意見もある。一足飛びにレベル4以上を目指すべきだという意見も少なくない。
レベル4というのは条件付きの完全自動運転。ここでいう条件付きというのは、高速道路限定であったり、特定の地域限定だったりというニュアンスだ。限定的なエリアであれば無人走行も可能というレベルだ。ほかにも「バレーパーキング」といって駐車場の入口で乗員が降りると、あとはクルマが無人で駐車スペースに行くというシステムをボッシュとダイムラーが共通で実用化しつつあるが、これもレベル4に自動運転に相当する。ドライバーいらずで動くことはできるが、特定エリアに限られるのでステアリングやペダルといった操作系を車両から省くことはできない。
そして完全な自動運転がレベル5となる。無人でユーザーを迎えに行くこともできるし、もちろん乗員が運転する必要もない。このレベルになるとペダルなどの操作系は不要になる。ただし、欧州を中心に無人走行中の最高速度を規制するルールがあったりする。レベル5の完全自動運転をインフラとして活かすには、法整備が必要といえそうだ。
電波の反射波で距離を測定する「ミリ波レーダー」
現時点で普及している自動運転技術は前述のレベル2に分類されるもので、ADASと呼ばれる先進運転支援システムについては主に高速道路に限定して使える機能が多い。その中で、もっとも多く使われているのがミリ波レーダーだ。ミリ波というのは高周波数帯(77~81GHz)の電波のことで、電波の反射波を測定することでレーダーの先に物体があることを検知するというものだ。
カメラを使ったシステムも多いが、そういた光学系のセンサーに対してミリ波レーダーは悪天候の影響を受けづらいというのが特徴。また、ミリ波レーダーの周波数は数字が大きいほど分解能と精度が高くなる。斜め後方からの接近車両を検知するブランインドスポット機能には24GHz帯のミリ波レーダーが使われていることが多いが、こちらも77GHzクラスのミリ波レーダーを使うようになるだろう。
距離と物体の輪郭を検知できる「LiDAR」
いま自動運転技術の開発においてもっとも注目を集めているのが「LiDAR(Light Detection and Ranging)」だ。読み方は「ライダー」、モノとしては光源と光センサーを用いた光学系のセンサーである。そのため単純な赤外線レーザーと似たようなものと思ってしまうかもしれないが、さにあらず。
LiDARはレーザー光によって物体をスキャンするというセンサーだ。つまり、物体までの距離とそのアウトラインを判断できるセンサーなのである。ミリ波レーダーでは物体までの距離はかなり正確に測ることができるが、物体のアウトラインがわからない。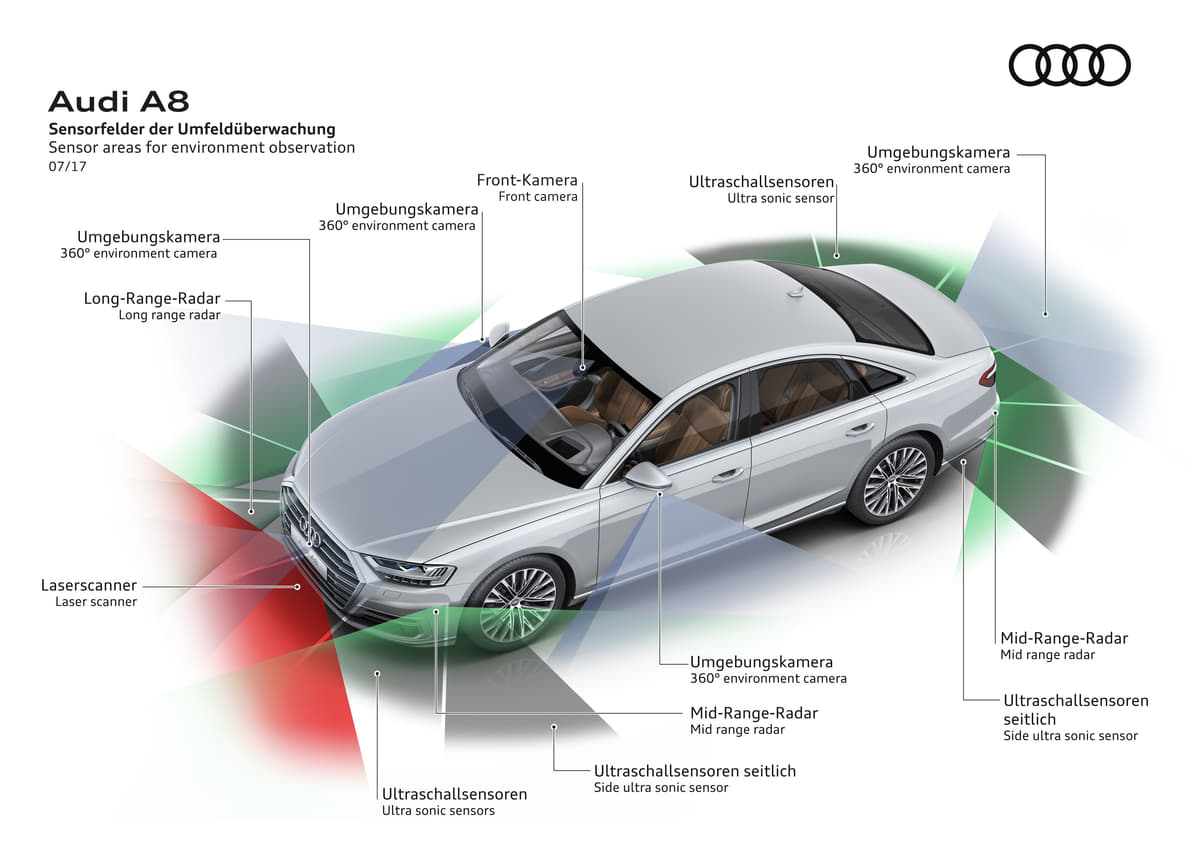
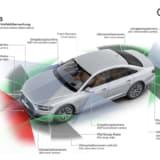
しかしLiDARであれば歩行者やサイクリストといった区別が可能となる。そのため自動運転の開発車両などではLiDARを車両の前後左右6か所程度に配置して、周囲の状況を把握する空間センサーのメインユニットとして用いていることが多い。すでにアウディA8が量産車としては初めてLiDARを搭載しているが、現時点では市販車への搭載例は非常に限られる。しかしレベル3以上の自動運転においては欠かせないセンサーとして認識されているのは間違いない。
AIによるカメラによる画像解析
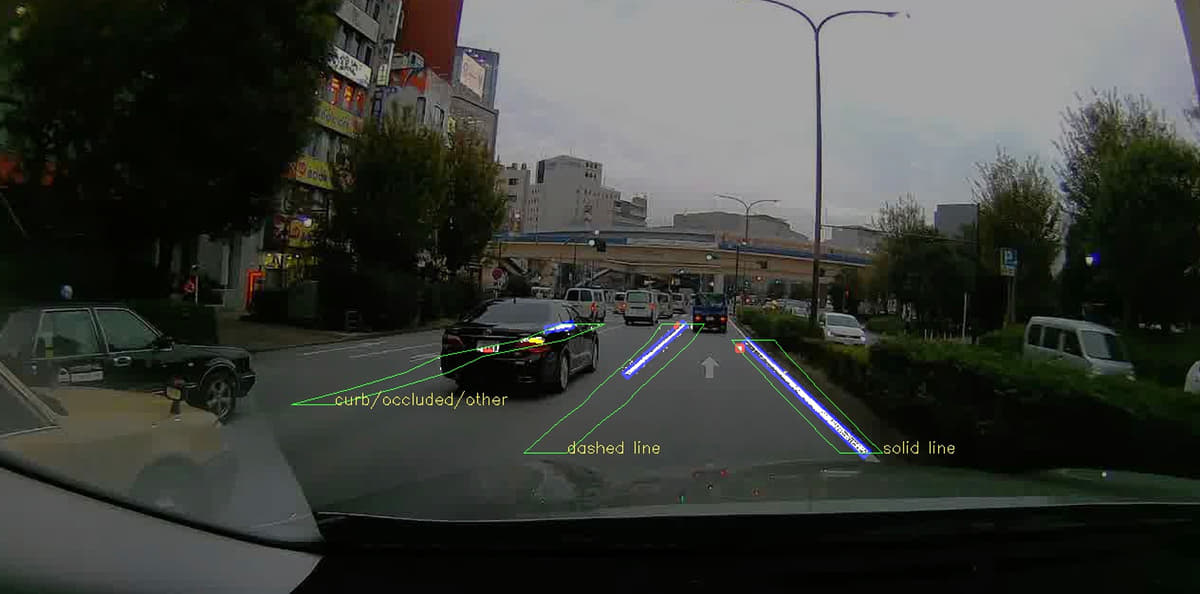
自動運転ではミリ波レーダーやLiDARが中心的なセンサーになるかといえば、そうではない。カメラもメインセンサーとして欠かせないものといえる。むしろレーダーやレーザーなどのセンサーに対して、対象物を識別する可能性でいえばカメラのほうが期待できる。そのポイントとなるのがAIを活用した画像解析だ。すでに路面の白線(区画線)を検知して車線維持アシストを作動させていたりするが、現在の画像解析が目指しているのはもっと高いレベルだ。
たとえば、横断する歩行者の顔の向きなどから歩行者の進行方向を識別して未来予測をするといったことも研究されている。歩行者などと混合した状況下での完全自動運転には人間が行っているような予測が必須となる。そのために重要なのが画像解析であり、それこそが自動運転AI開発の肝となっている。
道路を立体的にデータ化した高精度3Dマップ
いろいろな見方はあるが、高精度3Dマップやダイナミックマップといわれる建造物の様子まで含めて地図データは自動運転の実現に欠かせないといわれている。従来の地図は真上から見た状態の道や区分けといった情報だけだが、それだけでは自車位置の正確な特定にはデータが不足する。
また縁石や中央分離帯、横断歩道といったデータも完全自動運転には必要だ。そうした多種多様なデータを入れ込んだ地図を3Dマップなどと呼んでいる。高速道路では防音壁などのデータも必要だ。こうした高精度な地図データの作成とアップデートが自動運転のカギとなる。そのため地図の作成には多くのエネルギーが割かれている。