
自車はもちろん、衝突相手の安全も先駆けて追求してきた
メルセデス・ベンツでは1939年から安全性の研究開発をスタートし、「安全なクルマ」というブランド価値を確立するとともに、特許を無料で公開してきました。40年にわたり正規ディーラーで活動した筆者が現役時代にユーザーたちに説明してきた、メルセデス・ベンツの独自の安全性をQ&A方式で具体的に解説。今回は実験安全車「ESF」を中心に紹介します。
メルセデス・ベンツの「コンパティビリティ」とは?
メルセデス・ベンツの「コンパティビリティ(compatibility)」とは、共生・相互安全性の意味です。つまり、衝突時の相手車両や歩行者、自転車などへの影響を考慮し、相互の安全性を可能な限り確保しようという、メルセデス・ベンツ安全哲学の一環です。
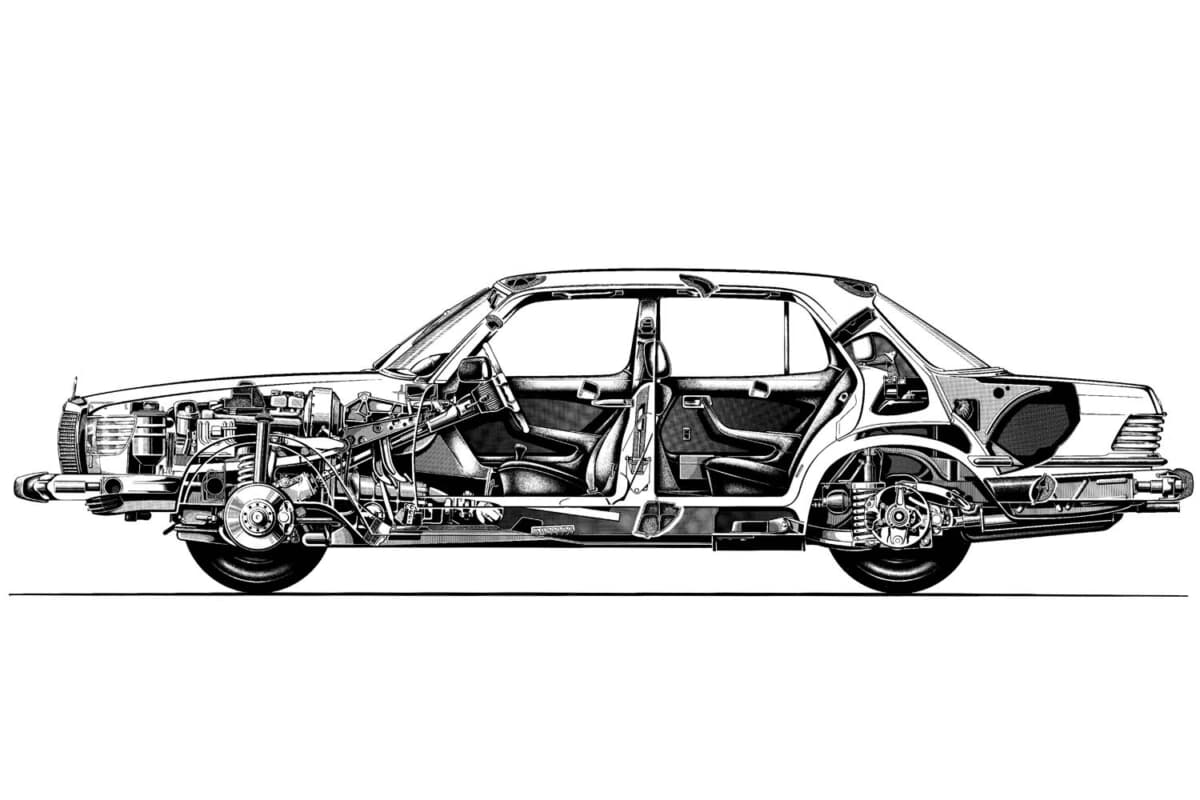
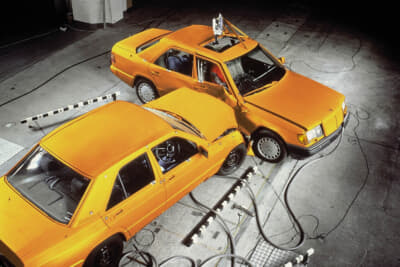
メルセデス・ベンツがこのコンパティビリティの哲学を世界で初めて市販車に本格的に導入したのが、1995年に発表した「Eクラス/W210」です。ここで具体化されたのは、自らの衝撃吸収能力をより高めることで生まれたクラッシャブルゾーンの余裕を、相手方の車両と分かち合うということです。
この技術は、エンジンやステアリング機構、フロントサスペンションなどエンジンルーム内の主要メカニズムをインテグラルサポートと呼ばれる別枠に組み付け、それを車両側に取り付けるという特別な構造で実現していました。現在、この考え方はメルセデス・ベンツの全モデルに反映され、衝突時にメルセデス・ベンツの車体前後が相手車両の衝突エネルギーを吸収し、より小さな車両の乗員に及ぶ危険をできる限り回避するように設計されています。

メルセデス・ベンツ全モデルの客室はきわめて頑丈に設計されていますが、自車の保護と相手車両の保護を両立させるために、下記の項目が考慮されています。
・万が一の事故発生時、大型車および小型車の相手のクラッシャブルゾーンが一致してかみ合うように、また乗り上げ/潜り込みの危険を最小化するようにボディを設計すること。
・大型車の場合は、小型車の衝撃を吸収して乗員に対する衝撃を軽減するため、クラッシャブルゾーンをできるだけ長く取るように設計すること。
・構造的に大きさに限界のある小型車の場合、クラッシャブルゾーンの剛性を比較的高く設計して、大型車側のクラッシャブルゾーンを有効に利用できるようにすること。
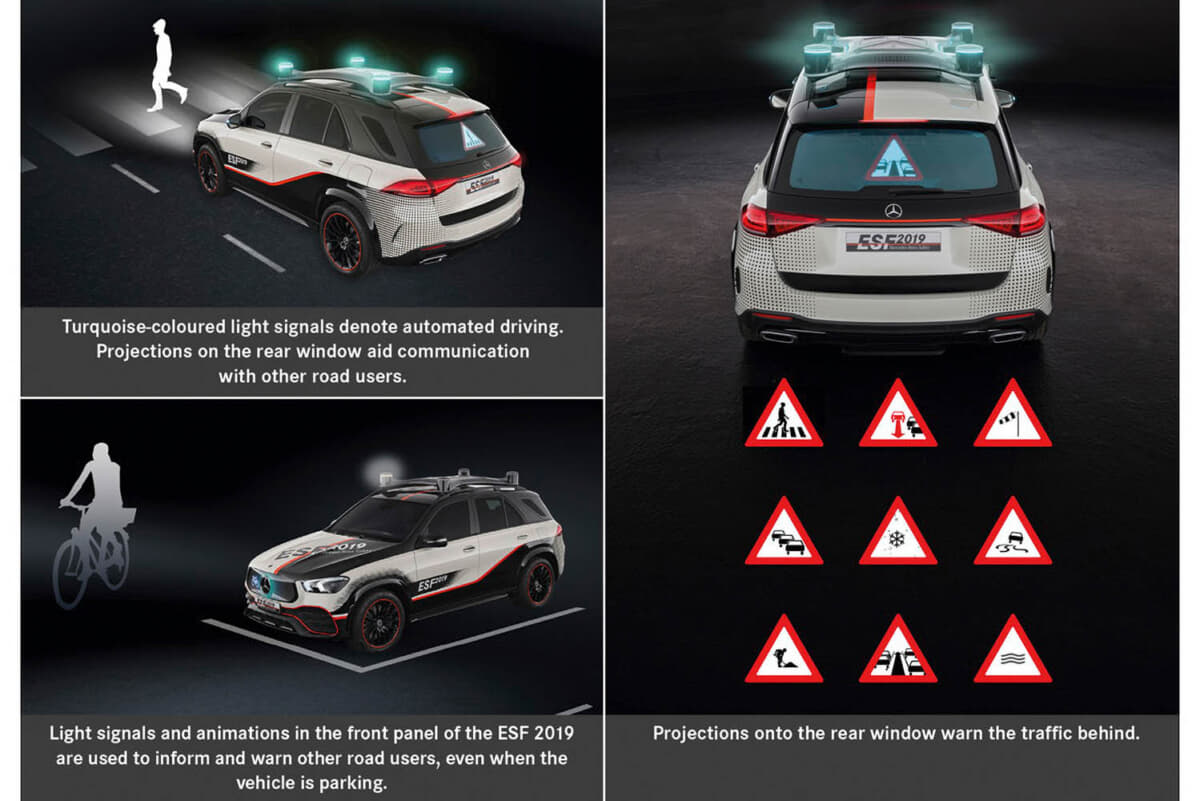
これらに加えて、メルセデス・ベンツは道路使用者とのコンパティビリティにも基づいて設計しています。
メルセデス・ベンツが用いるドライビング・シミュレーターとは?
メルセデス・ベンツのドライビング・シミュレーターの最大の目的は、事故を起こさないための能動的安全性の追求です。メルセデス・ベンツの最初のドライビング・シミュレーターは完全に自社で開発され、1985年にベルリンで運用が開始されました。
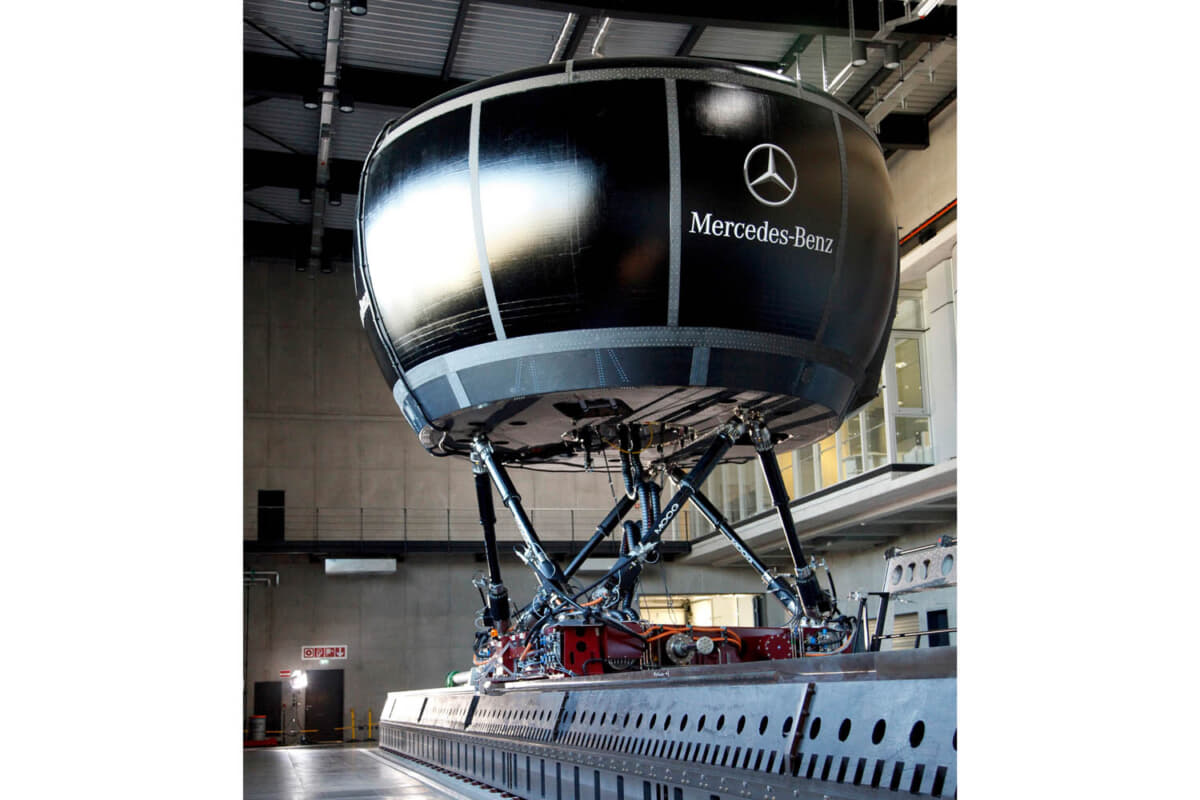
その後、2010年10月、ジンデルフィンゲンのメルセデス・ベンツ・テクノロジー・センター(MTC)でムービングベースの新ドライビング・シミュレーターが正式にオープンしました。このムービングベースシミュレーターは360度スクリーン、高速電気システム、テストセットアップに応じて横方向または縦方向の動きに対応する12mの長さのレールを備え、シミュレーターセルは6つの可動支柱に取り付けられています。
車両制御は、データラインによってドライビング・シミュレーターのコンピュター制御にリンクされています。シングルチャンネルまたはマルチチャンネルのプロジェクションと走行音を伝えるサウンドシステムのおかげで、非常にリアルにドライバーは仮想世界に没頭し、実際の道路交通のように行動できます。
つまり、巨大なドーム内に実験車両をセットし、加速・減速・旋回などの挙動を再現する装置や、その挙動と連動した走行シーンを映し出した360度のパノラマ映像などを使って、被験者であるドライバーに極度の疲労、睡眠不足、飲酒など、実際の走行テストが難しい状況をバーチャルに体験させ、その際の人間の反応や動作などのデーターを収集、分析することができます。